The question is why do we want to have height maps instead of normal maps in the first place? Well, there are various reasons but the most obvious are that they are easier to edit, generally easier to understand and the result, when applied as displacement map, is easier to anticipate. In other words, while normals maps do have some advantages, they are generally less intuitive to work with and that’s probably a good reason why we might want to convert them. But before going into details how the conversion is done, let’s quickly recap what a normal map is and how it could be generated.
In fact it’s pretty easy and hence we’ll set up a simple example. Let’s take a grid, for example, and apply a noise function to it (in our case a mountainSop). Next compute point normals for the deformed grid and encode these normals as colors. Finally just write out the colors as texture map or directly generate the map by using the texture baker. And basically that’s it, the result is our normal map.
But now let’s reverse the process and assume we have our normal map but the geometry is just a flat grid. How can we reconstruct the original deformed geometry?

Grid 
Displaced grid 
Normals 
Normal map
Well, let’s start simple. As we already know and the name “normal map” implies, normals are encoded as colors. To be more precise, the rgb values of our map correspond to the xyz components of the normals we are searching for. This means we can pretty much do a 1:1 conversion. The only thing we have to take care of is changing the range from 0, 1 (colors) to -1, 1 (normals). If we’ve done that we indeed end up with proper normals, the grid however, is still flat. What we need to do next is adjusting the points position/height so that the displaced grid finally matches the original deformed geometry. And that’s the tricky part. So, the question now is how are we going to get the height information out of our normals?
Well, one way for instance, is trying to solve this problem geometrically. This could be done by iteratively moving the points vertically up/down until new computed normals match the ones we got from our normal map. For a simple mesh/map this technique is fast and reasonably accurate but for more complicated maps and/or irregular meshes it starts failing and the result might just not be what we’d have expected. To overcome this problem there exist various other methods which could be used instead but my personal favourite is, once again, to rely on the famous Poisson equation.
If we assume height is a function on the mesh, it can be computed by minimizing the difference between our pre-computed normals (projected onto the tangent plane on the mesh) and the gradient of this function in the least squares sense. Since this is leading to the Poisson equation it’s easy to set up a linear system in the typical form A x = b. If we then use a fast sparse matrix library and let it do it’s magic by solving the system for x, we finally get what we were looking for, namely our desired height.

Flatt Grid 
Normal map 
Normals 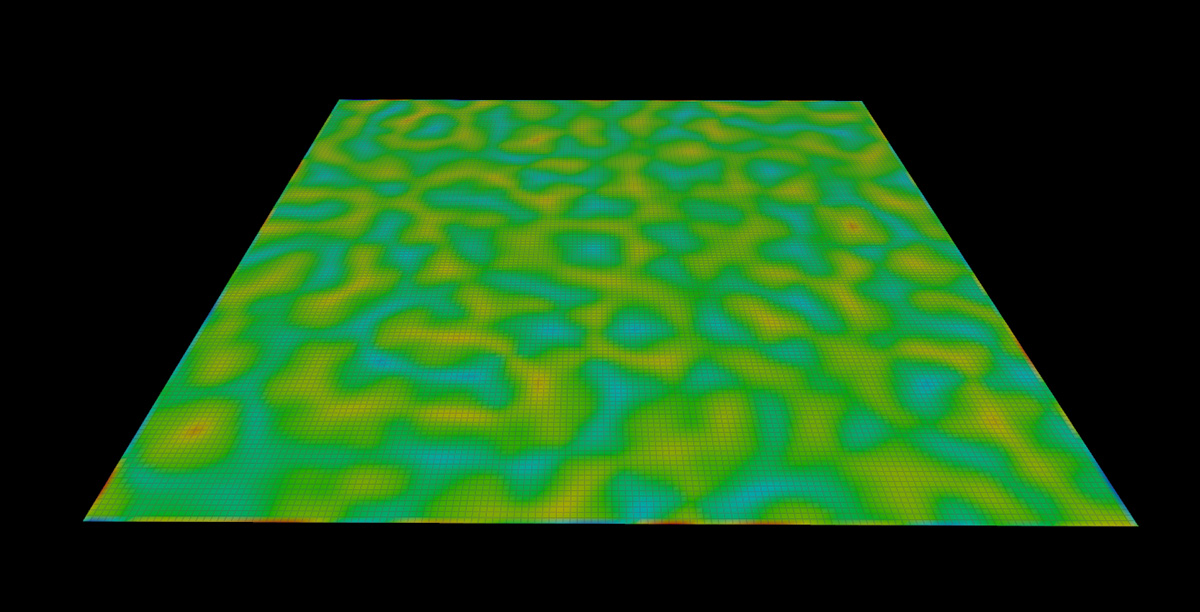
Divergence 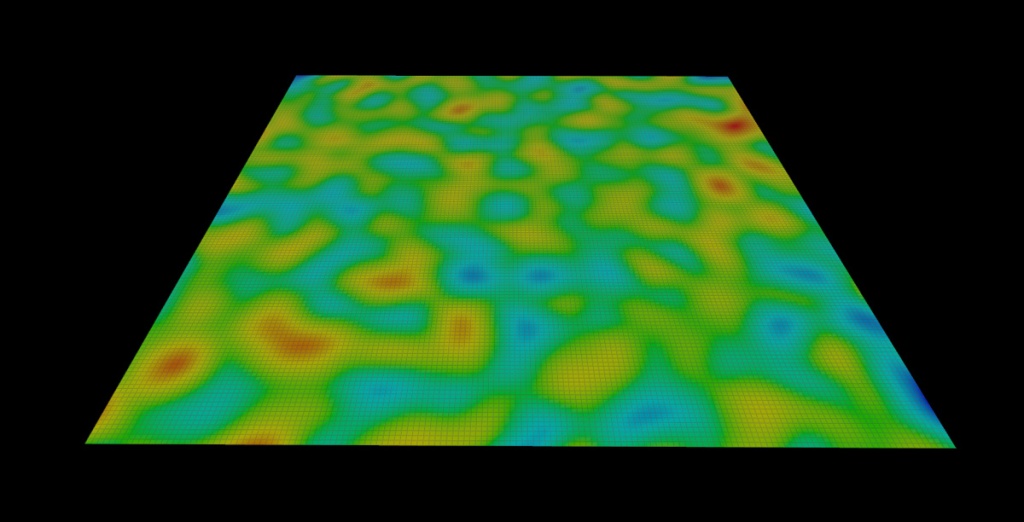
Height 
Displaced grid
And of course, it works on non-flat meshes too.

Bunny 
Normal Map 
Normals 
Divergence 
Height 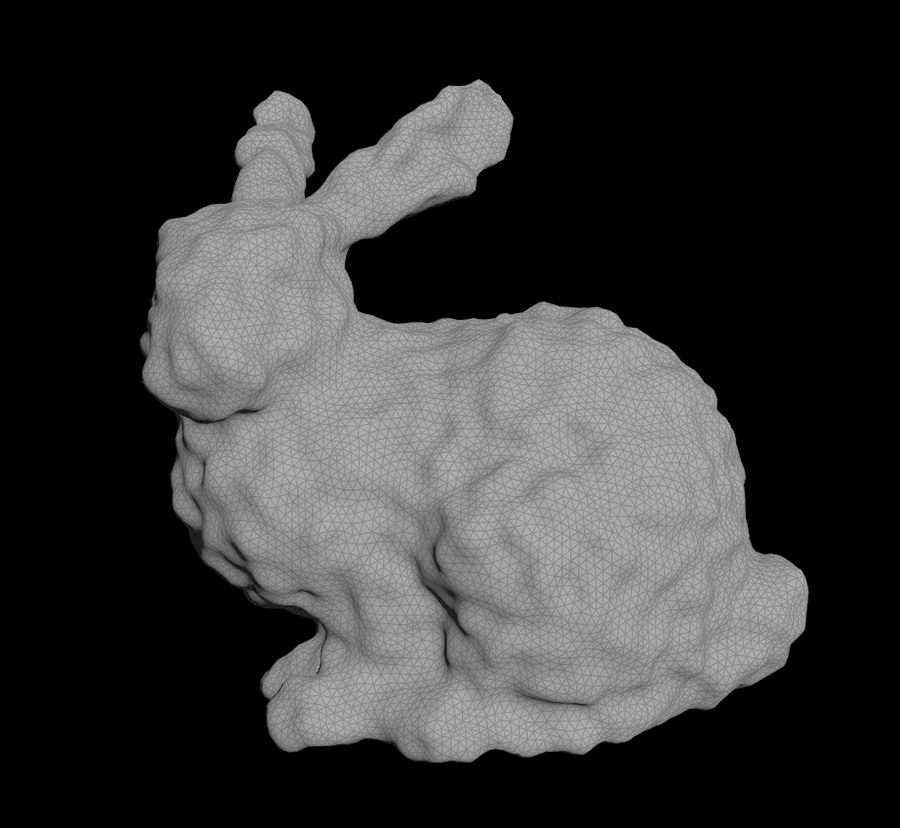
Displaced bunny
Instead of setting up and solving everything in matrix form it’s also possible to do it with VEX/OpenCl although the setup is a bit different and it takes longer to solve. Anyways, for those who don’t have access to a fast matrix solver it’s a reasonable alternative. The process is pretty much the same as it’s done in this blog post.

:Hi, I used an FFT based approach to do the reverse transformation. You may find this article relevant https://stannum.io/blog/0IwyJ-.
LikeLike
hi could you share a hip file on how this is implemented, it would be a huge help
LikeLike