Some time ago I wrote a blog post about the covariance matrix and how it’s eigenvectors can be used to compute principal axes of any geometry. This time I’m writing again about eigendecompositions but instead of the covariance matrix it’s the Laplace-Beltrami operator which is decomposed into its eigenvalues and eigenvectors. Now, the question is why would we like to find eigenvalues and eigenvectors of the laplacian? Well, there are a number of applications for which this is very useful. For instance, calculating the biharmonic distance on a mesh. Dimensionality reduction and compression are obvious examples but beside that it’s quite important for various other things too, such as parameterization, smoothing, correspondence analysis, shape analysis, shape matching and many more.
By projecting the point coordinates onto the eigenvectors we can transform the geometry to the corresponding eigenspace. Similar to the Discrete Fourier Transform, the new mapping could then be used for doing various calculations. which are easier to perform in the spectral domain, such as clustering and segmentation.








A very important property of eigenvalues and eigenvectors of the Laplace-Beltrami operator is that they are invariant under isometric transformations/deformations. In other words, for two isometric surfaces the eigenvalues and eigenvectors coincide and consequently their eigenvector projection also coincide. Since a character in different poses is usually a near-isometric deformation, eigenfunctions are quite useful for finding non-rigid transformations or for matching different poses. For instance, if we have two characters like in the example below, we can rely on eigenvectors to compute a correspondence matrix and therefore find corresponding points on the two meshes. Subsequently, these points could then be used to match one pose to the other. Now you might ask why do we need eigenvectors for this? Well, if it is the same character in different poses, or more precisely, the same geometry with the same pointcount, this is easy. If it’s not the same geometry, things get much harder. This is typically the case if we are working with 3D scanned models or shapes which have been remeshed like in the example below. The two characters have different pointcounts: The mesh of the left character has 1749 points, the mesh of the right character has 1928 points.



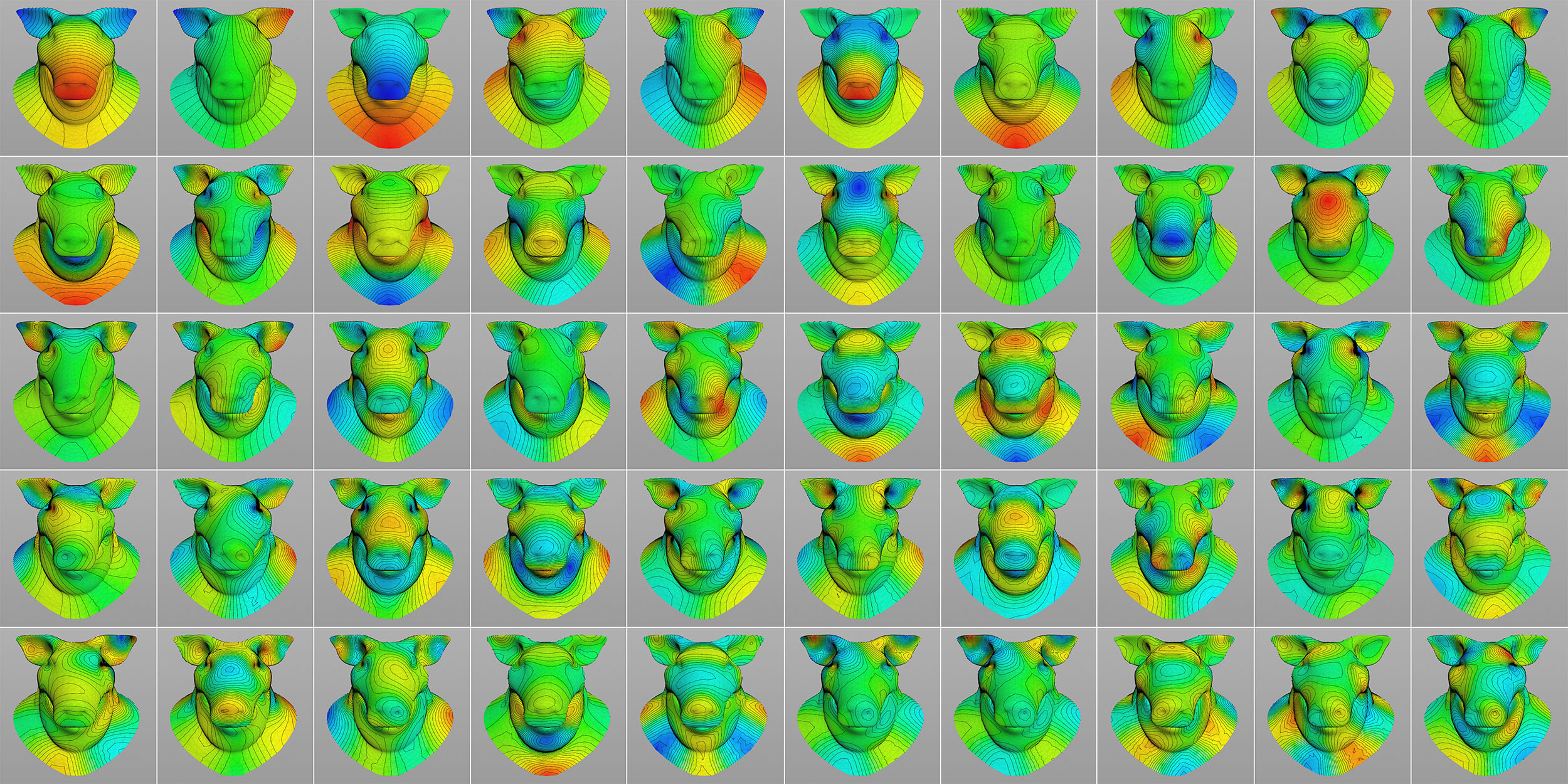
A very useful tool is the Fiedler vector which is the smallest non-zero eigenvector. It is a handy shape descriptor and can be used to compute shape aware tangent vector fields, to align shapes, to compute uvs, for remeshing and many other things. The images below show that isolines based on the Fiedler vector are nicely following the shape of different meshes.





H. Zhang, O. Kaick, R. Dyer: Spectral Mesh Processing
V. Jain, H. Zhang: Robust 3D Shape Correspondence in the Spectral Domain
S. Dong, P. T. Bremer, M. Garland, V. Pascucci, J. C. Hart: Spectral Surface Quadrangulation
B. Vallet, B. Lèvy: Spectral Geometry Processing with Manifold Harmonics
A. Shtern, R. Kimmel: Matching the LBO Eigenspace of Non-Rigid Shapes via High Order Statistics

In the figure where the mesh is reconstructed from different modes, can you explain how this relates to the Laplacian eigenfunctions please? Have you somehow used the Laplacian eigenfunctions to reconstruct the vertex coordinates, and this reconstruction improves with more modes? Or is this reconstruction based on eigenfunctions of covariance matrix of the 3D vertex coordinates, and is not related to the eigenfunctions of the laplacian?
LikeLike
Which method you were using for computation of Laplace-Beltrami operator in order to achieve such smooth result? I have used a method which relies on cotangent weights and I see that result is bounded to the mesh topology rather than it’s curvature. So if there will be changes to the topology of the mesh, the contours will be different.
LikeLike